| [1] |
马翠, 陈沛哲, 杨璐, 韩涛, 汤赟, 陈昌勇, 丁志华. 基于机器学习的扫频光学相干断层扫描成像畸变校正. 必威体育下载
,
2025, 74(16): 164202.
doi: 10.7498/aps.74.20250545
|
| [2] |
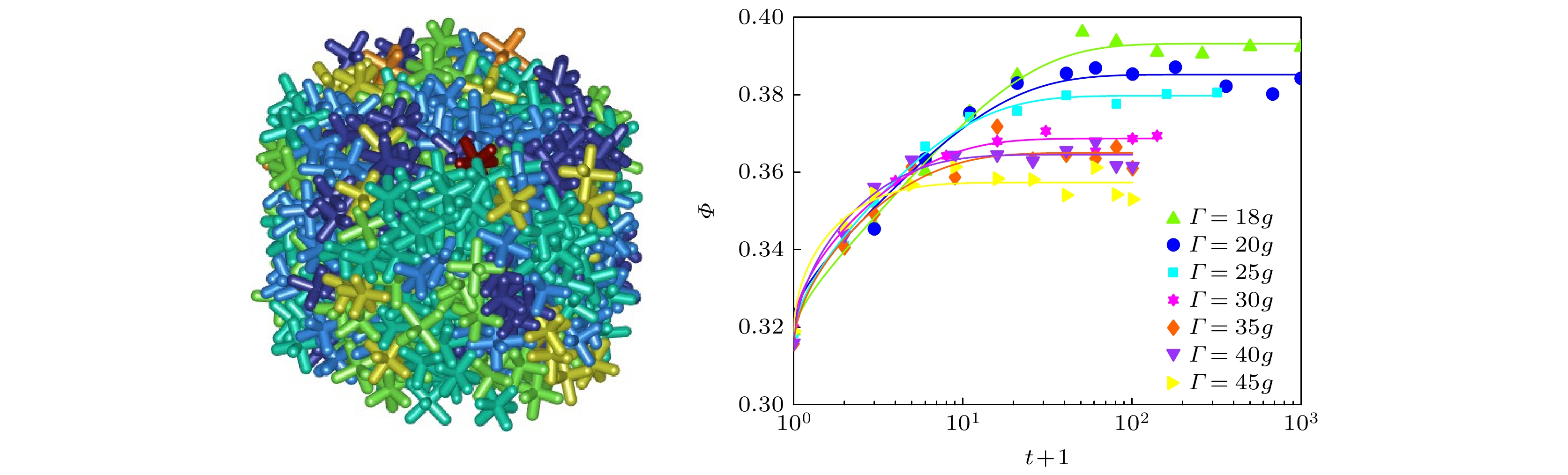
刘泽林, 袁后非, 曾志坤, 姜永伦, 葛转, 王宇杰. 振动驱动下双分散硬球颗粒堆积的结构. 必威体育下载
,
2025, 74(13): 134502.
doi: 10.7498/aps.74.20250232
|
| [3] |
蒋亦民, 刘佑. 颗粒-颗粒接触力的热力学模型. 必威体育下载
,
2018, 67(4): 044502.
doi: 10.7498/aps.67.20171441
|
| [4] |
孙璐, 火炎, 周超, 梁建辉, 张祥志, 许子健, 王勇, 吴义政. 利用扫描透射X射线显微镜观测磁涡旋结构. 必威体育下载
,
2015, 64(19): 197502.
doi: 10.7498/aps.64.197502
|
| [5] |
王琛, 安红海, 王伟, 方智恒, 贾果, 孟祥富, 孙今人, 刘正坤, 付绍军, 乔秀梅, 郑无敌, 王世绩. 利用软X射线双频光栅剪切干涉技术诊断金等离子体. 必威体育下载
,
2014, 63(12): 125210.
doi: 10.7498/aps.63.125210
|
| [6] |
杨晓京, 方聪聪. 球形压头与单晶铝材料纳米接触过程的多尺度分析. 必威体育下载
,
2013, 62(18): 180702.
doi: 10.7498/aps.62.180702
|
| [7] |
张品, 梁艳梅, 常胜江, 范海伦. 基于能量最小化的肾脏计算断层扫描图像分割方法. 必威体育下载
,
2013, 62(20): 208701.
doi: 10.7498/aps.62.208701
|
| [8] |
段芳莉, 王光建, 仇和兵. 纳米接触过程中黏着规律的变化. 必威体育下载
,
2012, 61(4): 046801.
doi: 10.7498/aps.61.046801
|
| [9] |
管俊伟, 贺端威, 王海阔, 彭放, 许超, 王文丹, 王凯雪, 贺凯. 力学结构及末级压砧硬度对八面体压腔高压发生效率的影响. 必威体育下载
,
2012, 61(10): 100701.
doi: 10.7498/aps.61.100701
|
| [10] |
马天鹏, 胡立群, 陈开云. 通过软X射线信号研究芯部等离子体的结构. 必威体育下载
,
2009, 58(2): 1110-1114.
doi: 10.7498/aps.58.1110
|
| [11] |
胡国琦, 涂洪恩, 厚美瑛. 二维颗粒气体在堆积过程中的能量耗散. 必威体育下载
,
2009, 58(1): 341-346.
doi: 10.7498/aps.58.341
|
| [12] |
苗天德, 宜晨虹, 齐艳丽, 慕青松, 刘 源. 集中力作用下球形颗粒六角密排堆积体的传力研究. 必威体育下载
,
2007, 56(8): 4713-4721.
doi: 10.7498/aps.56.4713
|
| [13] |
张 耘. 极化子荧光及其断层扫描对Ti:LiNbO3光波导表征研究. 必威体育下载
,
2007, 56(1): 280-284.
doi: 10.7498/aps.56.280
|
| [14] |
郑立静, 李树索, 李焕喜, 陈昌麒, 韩雅芳, 董宝中. 7050铝合金等通道转角挤压过程中显微结构和力学性能演化的小角x射线散射研究. 必威体育下载
,
2005, 54(4): 1665-1670.
doi: 10.7498/aps.54.1665
|
| [15] |
周炳卿, 刘丰珍, 朱美芳, 谷锦华, 周玉琴, 刘金龙, 董宝中, 李国华, 丁 琨. 利用x射线小角散射技术研究微晶硅薄膜的微结构. 必威体育下载
,
2005, 54(5): 2172-2175.
doi: 10.7498/aps.54.2172
|
| [16] |
赵辉, 杜志伟, 周铁涛, 刘培英, 董宝中, 陈昌麒. Al-Zn-Mg-Cu-Li合金时效过程微结构演化的小角x射线散射研究. 必威体育下载
,
2004, 53(4): 1251-1254.
doi: 10.7498/aps.53.1251
|
| [17] |
杨国洪, 张继彦, 张保汉, 周裕清, 李 军. 金激光等离子体X射线精细结构谱研究. 必威体育下载
,
2000, 49(12): 2389-2393.
doi: 10.7498/aps.49.2389
|
| [18] |
罗远苏, 赵继良, 黄胜涛. 几种金属玻璃结构的X射线研究. 必威体育下载
,
1982, 31(9): 1256-1262.
doi: 10.7498/aps.31.1256
|
| [19] |
李家璘, 陈良辰, 沈主同. 双级四压砧(四面体)静态超高压技术. 必威体育下载
,
1975, 24(4): 301-306.
doi: 10.7498/aps.24.301
|
| [20] |
刘叔仪. 塑压接触平面上之长程滑动与短程滑动(等倾陡线规律). 必威体育下载
,
1958, 14(1): 9-16.
doi: 10.7498/aps.14.9
|














 下载:
下载:




